Zifei Nieさんの論文がApplied Energy誌に掲載されました!
Abstract
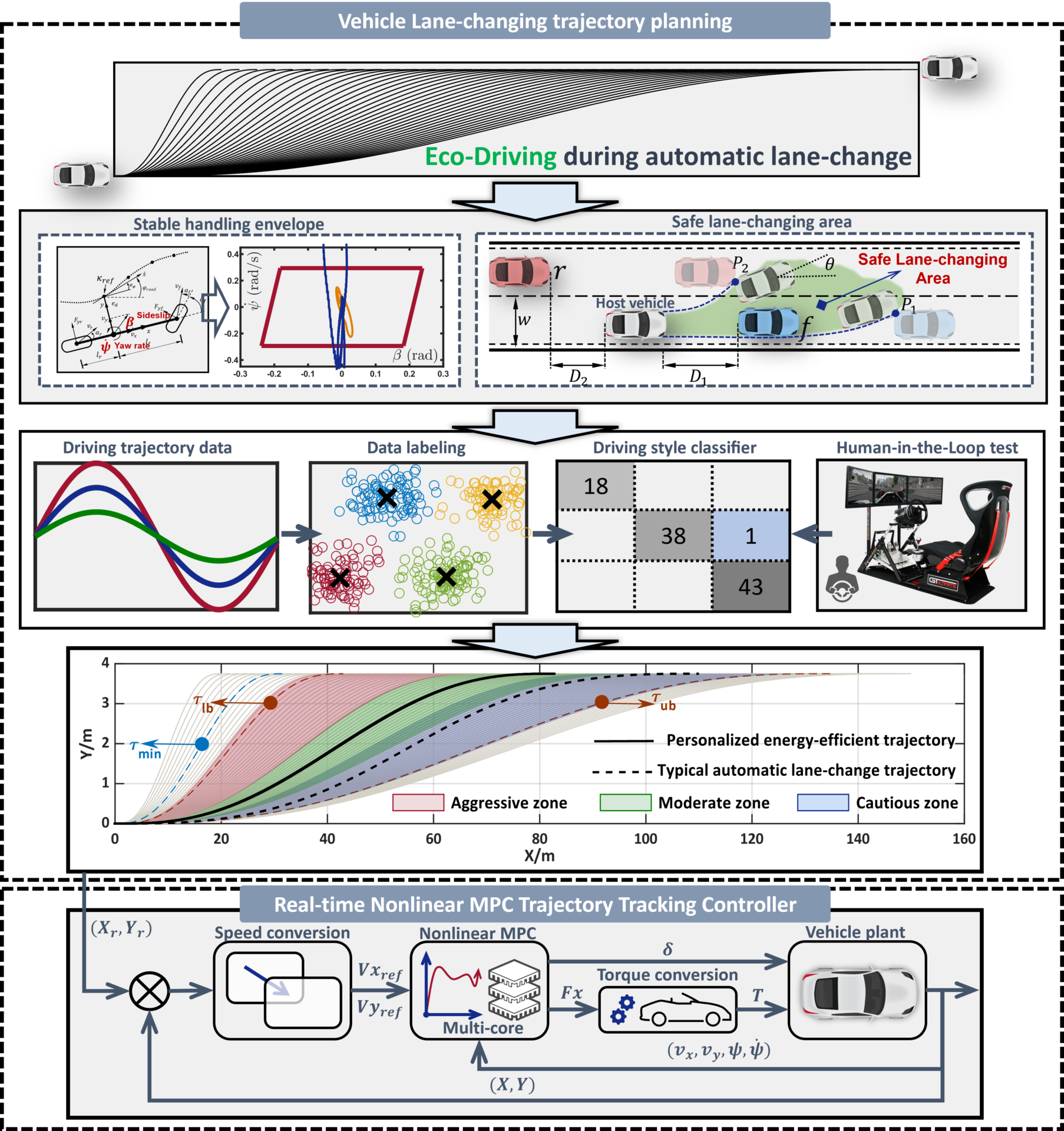
With the aim of realizing energy-efficient, personalized, and safe mobility, a novel lane-changing motion planning strategy for personalized energy-efficient autonomous driving is proposed in this research. The key technologies consist of trajectory planning and trajectory tracking. Taking the quintic polynomials as the general trajectory cluster generator, the overall trajectory planning is converted into a constrained optimization problem using the lane-changing duration. The feasible and safe lane-changing trajectories can be extracted from the general trajectory cluster by introducing a stable handling envelope and a safe lane-changing area considering the constraints of vehicle dynamics limitation and surrounding traffic vehicles. A driving style identification module is developed based on multi-class Gaussian process classification utilizing real driving data to determine the trajectories that can characterize personalized features. Reflecting the constraints of feasibility, safety, and personalization on the boundaries of lane-changing duration, an energy-optimal lane-changing trajectory representing a specific driving style can be found and regarded as a reference. To precisely and rapidly control the vehicle to track the reference trajectory, a real-time nonlinear model predictive controller is designed and solved utilizing the parallel method. The algorithms proposed above are integrated and Driver-in-the-Loop experimental verifications are conducted. Experiment results demonstrated that the proposed strategy is able to realize lane change with an energy saving rate of 2.87% to 5.73% compared with human drivers’ maneuver. Comparative simulation with a typical automatic lane-change model also shows the effectiveness of the proposed approach, which is capable of not only accomplishing the energy-efficient lane change but also satisfying human driver’s personalized driving preferences.
Figure: System Architecture of the proposed personalized energy-efficient lane-changing motion planning.
Zifei Nie paper published in Applied Energy journal!
Abstract
With the aim of realizing energy-efficient, personalized, and safe mobility, a novel lane-changing motion planning strategy for personalized energy-efficient autonomous driving is proposed in this research. The key technologies consist of trajectory planning and trajectory tracking. Taking the quintic polynomials as the general trajectory cluster generator, the overall trajectory planning is converted into a constrained optimization problem using the lane-changing duration. The feasible and safe lane-changing trajectories can be extracted from the general trajectory cluster by introducing a stable handling envelope and a safe lane-changing area considering the constraints of vehicle dynamics limitation and surrounding traffic vehicles. A driving style identification module is developed based on multi-class Gaussian process classification utilizing real driving data to determine the trajectories that can characterize personalized features. Reflecting the constraints of feasibility, safety, and personalization on the boundaries of lane-changing duration, an energy-optimal lane-changing trajectory representing a specific driving style can be found and regarded as a reference. To precisely and rapidly control the vehicle to track the reference trajectory, a real-time nonlinear model predictive controller is designed and solved utilizing the parallel method. The algorithms proposed above are integrated and Driver-in-the-Loop experimental verifications are conducted. Experiment results demonstrated that the proposed strategy is able to realize lane change with an energy saving rate of 2.87% to 5.73% compared with human drivers’ maneuver. Comparative simulation with a typical automatic lane-change model also shows the effectiveness of the proposed approach, which is capable of not only accomplishing the energy-efficient lane change but also satisfying human driver’s personalized driving preferences.
Figure: System Architecture of the proposed personalized energy-efficient lane-changing motion planning.
*The upload address for supervisor recommendation forms has been changed!
Apologies.
Please upload your supervisor nomination form for the Decarbonization Fellowship (general and reserved) currently open for applications to
https://archive.iii.kyushu-u.ac.jp/public/2PYRwBTIcv9gM3rzDHX–XA-iy0WLXKAZwXm-LWqnao5
Please note that recommendation forms submitted to the URL before the change by the morning of December 1 have been accepted.
※指導教員推薦書のアップロード先、変更されてます!
申し訳ございません。
現在公募中の脱炭素フェローシップ(一般・予約)の指導教員推薦書のアップロード先は、以下のとおりです。
https://archive.iii.kyushu-u.ac.jp/public/2PYRwBTIcv9gM3rzDHX–XA-iy0WLXKAZwXm-LWqnao5
なお、変更前URLへ12/1午前中までに提出された推薦書は、受理されております。
Summer camp 2022 in Kuju Joint Training Center



夏合宿2022 in 九重共同研修所
エネルギー研究教育機構は、2021年4月から脱炭素エネルギー先導人材育成フェローシップの活動に取り組んでいます。
脱炭素フェローシップは、未来の脱炭素社会を構想して実現・創造する人材を育成することを目的としています。
定期的に開催する合同ゼミや成果報告会では、フェローと経験豊富な産業界や国内外の研究者とのつながりを築いていきます。
夏合宿は、フェローシッププログラムの重要なイベントの一つです。
今年は9月15日~16日の2日間、九州地区国立大学 九重共同研修所で充実した合宿を行いました!

初日は、2期生フェロー5名による研究発表を行いました。その後、1期生フェロー10名がポスター発表を行いました。
2日目は、脱炭素社会の実現に向けた我々の研究の位置づけについて議論しました。
午後は、地熱エネルギー出力が日本最大の八丁原地熱発電所(九州電力)を訪問し、説明を受け、施設内を視察しました。
研究発表やポスター発表では、進捗状況を共有し、新しいアイデアについて議論し、様々な研究分野間のつながりを構築するためのブレーンストーミングを行いました。
また、一緒にバーベキューをしたり、八丁原地熱発電所見学、日本一の大吊橋を渡ったりと、とても楽しい時間を過ごすことができました。

夏合宿の様子は、こちらのビデオでご覧いただけます。
今後も多くの学生と、共に視野を広げ、持続可能な脱炭素社会の実現を目指していきます。
三苫春香さんが「伊藤早苗賞女子大学院生部門 優秀賞」を受賞しました!
フェロー1期生の三苫春香さんが、2022年度九州大学若手女性研究者・女子大学院生優秀研究者賞(伊藤早苗賞)、女子大学院生部門 優秀賞を受賞しました!

九州大学は、常に未来の課題に挑戦する活力に満ちた最高水準の研究・教育拠点となることを基本理念とし、国際的視点を含めたダイバーシティを尊重する教育・研究を推進しています。
国際的にも女性の活躍が注目される中、本制度は、学術上優れた研究成果を挙げた本学若手女性研究者(教授を除く。)ならびに女子大学院生を表彰することにより、当該女性研究者自身およびこれに続く多くの若手女性研究者の励みとし、その研究意欲を一層高め、もって学術研究の将来を担う優秀な女性研究者の育成に資することを目的として「九州大学若手女性研究者・女子大学院生優秀研究者賞」を創設しました。
Haruka Mitoma received Sanae-I. Itoh Awards for Outstanding Kyushu University Female Researchers!
Haruka Mitoma, a 1st year Fellow, has received Sanae-I. Itoh Awards for Outstanding Kyushu University Female Researchers!
Kyushu University has been strengthening its effort to become the global hub of research and education of the highest standards, which energetically addresses the future challenges. It has also promoted diversity in research and education including international perspectives.
With the increased awareness of women’s empowerment, the University has created a commendation program named “Kyushu University Young Female Researchers and Female
Graduate School Students Awards” to honor young female researchers (excluding professors) and female graduate school students, who have obtained outstanding academic research achievements.
This program intends to encourage the award winners and other young female researchers, to improve their motivation in research and thereby contribute to producing outstanding female researchers who will lead the future of academic research.
Keitaro Maeno received the Best Presentation Award (IIOA2022)!
Keitaro Maeno, a 1st year Fellow, has received the Geoffrey J.D. Hewings Prize (Best Presentation Award) at the 28th International Input-Output Association Conference held in Malaysia from 28 Aug to 2 Sep!

前野啓太郎さんが優秀発表賞(IIOA2022)を受賞しました!
フェロー1期生の前野啓太郎さんが、マレーシアで8/28から9/2に開催された28th International Input-Output Association Conferenceで、Geoffrey J.D. Hewings Prize(優秀発表賞)を受賞しました!