Zifei Nie paper published in Applied Energy journal!
Abstract
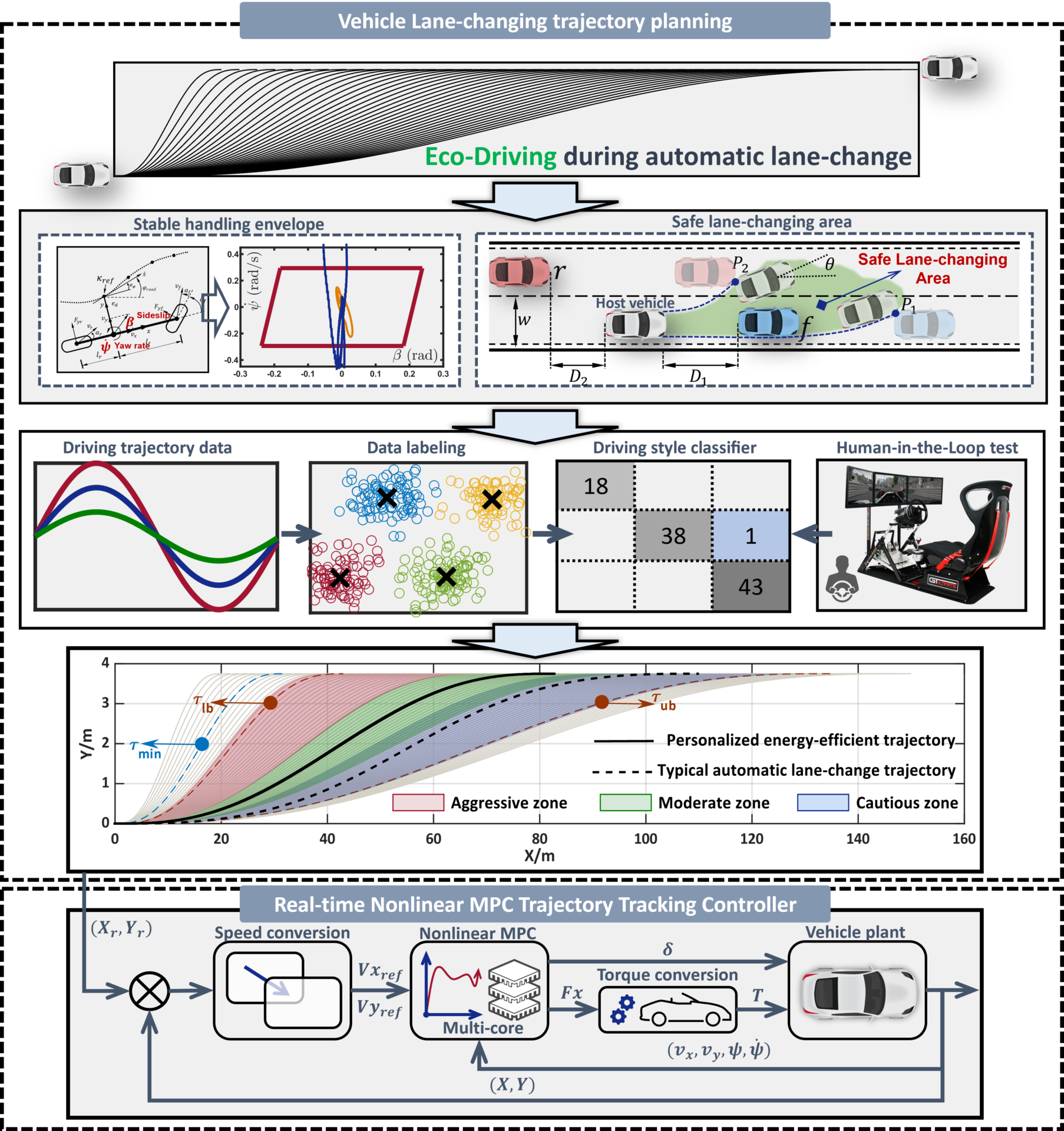
With the aim of realizing energy-efficient, personalized, and safe mobility, a novel lane-changing motion planning strategy for personalized energy-efficient autonomous driving is proposed in this research. The key technologies consist of trajectory planning and trajectory tracking. Taking the quintic polynomials as the general trajectory cluster generator, the overall trajectory planning is converted into a constrained optimization problem using the lane-changing duration. The feasible and safe lane-changing trajectories can be extracted from the general trajectory cluster by introducing a stable handling envelope and a safe lane-changing area considering the constraints of vehicle dynamics limitation and surrounding traffic vehicles. A driving style identification module is developed based on multi-class Gaussian process classification utilizing real driving data to determine the trajectories that can characterize personalized features. Reflecting the constraints of feasibility, safety, and personalization on the boundaries of lane-changing duration, an energy-optimal lane-changing trajectory representing a specific driving style can be found and regarded as a reference. To precisely and rapidly control the vehicle to track the reference trajectory, a real-time nonlinear model predictive controller is designed and solved utilizing the parallel method. The algorithms proposed above are integrated and Driver-in-the-Loop experimental verifications are conducted. Experiment results demonstrated that the proposed strategy is able to realize lane change with an energy saving rate of 2.87% to 5.73% compared with human drivers’ maneuver. Comparative simulation with a typical automatic lane-change model also shows the effectiveness of the proposed approach, which is capable of not only accomplishing the energy-efficient lane change but also satisfying human driver’s personalized driving preferences.
Figure: System Architecture of the proposed personalized energy-efficient lane-changing motion planning.